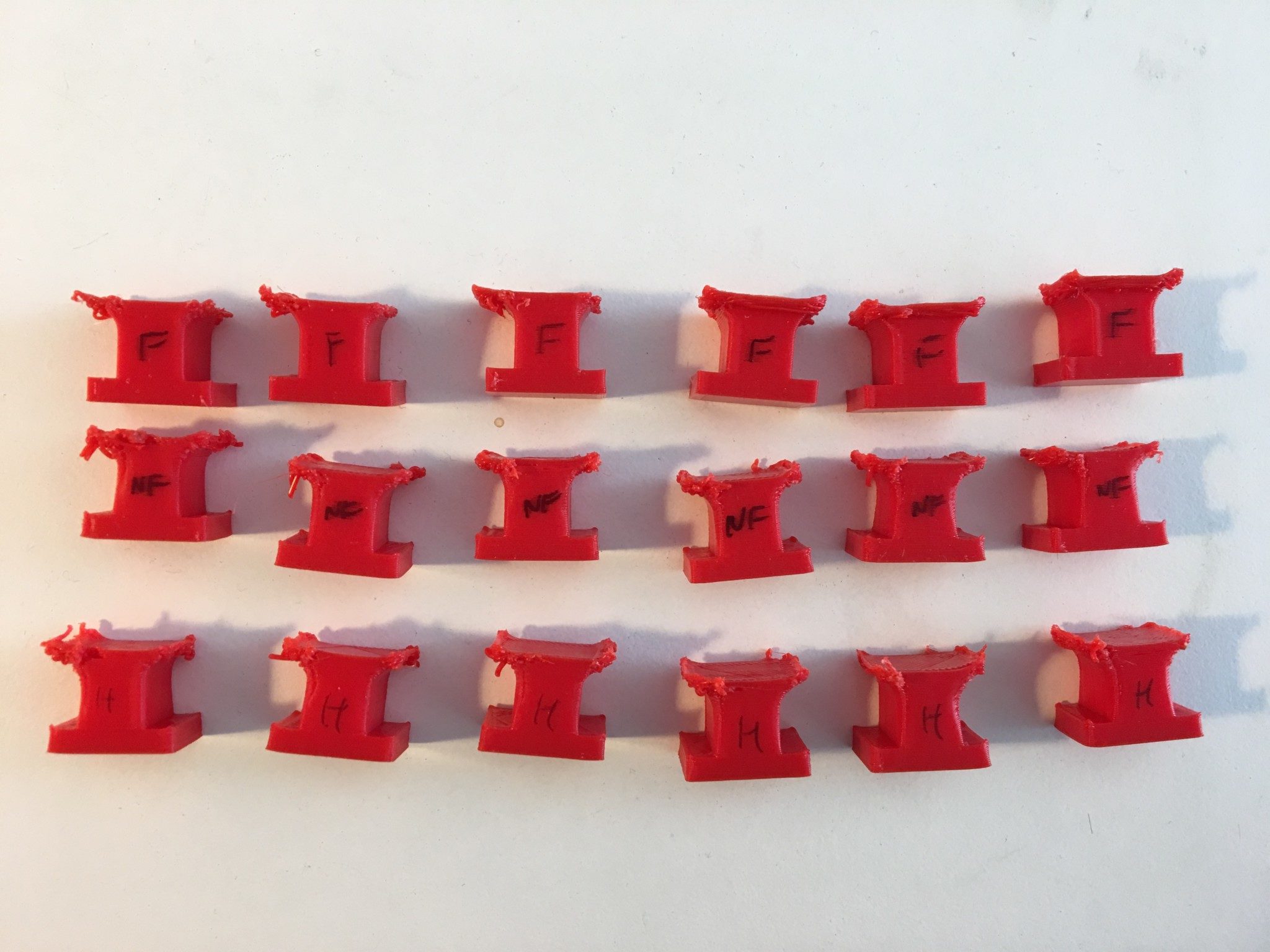
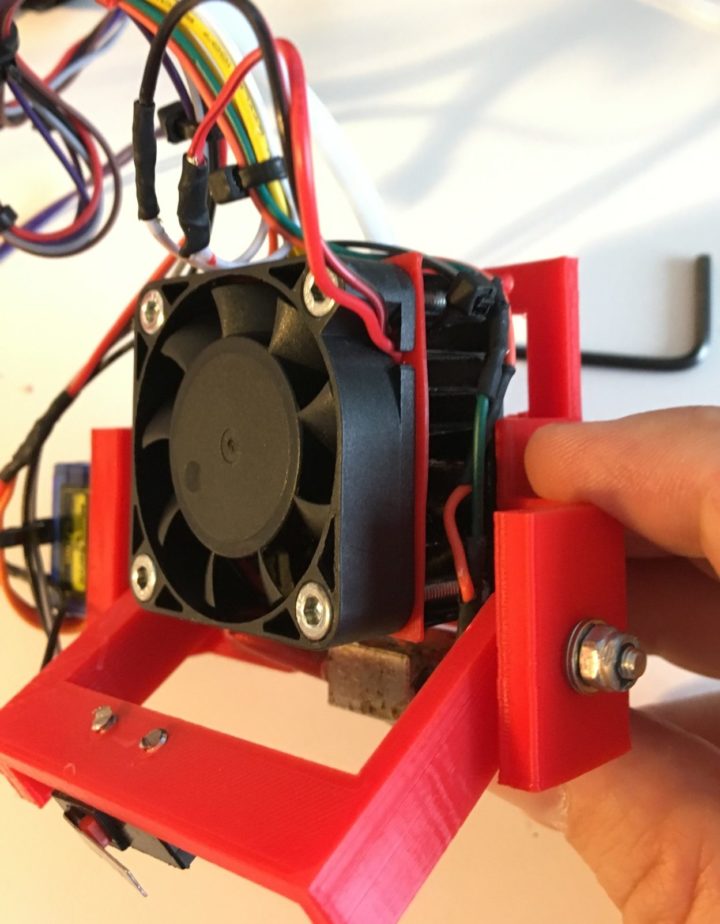
One of the early improvements I added to Squirty was a ducted fan to blow air on the plastic just after extrusion. The aim of the fan is to cool the plastic more quickly and to provide better bridging performance. I measured the improvement in bridging with a ducted fan in an old post. I’ve always assumed that just as a fan improves bridging, it should also improve overhang performance. After all, an overhang is just half a bridge. However some recurrent print failures made me suspect that a fan actually makes overhang performance worse. In this post I’ll describe an investigation that suggests I should turn off fan for overhangs, or at least for arch shaped overhangs.
In previousposts I described a z-probe modification I made to Squirty the RepRap. The major issue with this z-probe was that the point probed was about 30mm away from the nozzle, which meant that the probe could not reach the entire bed. I’ve designed a new version that resolves that issue. By mounting the microswitch on the same side as the hotend the microswitch for the z-probe is almost directly underneath the nozzle. Mounting the z-probe in this way required creating “wings” that stop the servo arm from colliding with the z-axis at low/high x values. In this post I’ll describe how to assemble and set up this z-probe on a RepRap Huxley. I hope this is useful for anyone out there who is still, like me, printing on a 5+ year old design. If you do try it then please let me know how it works out!
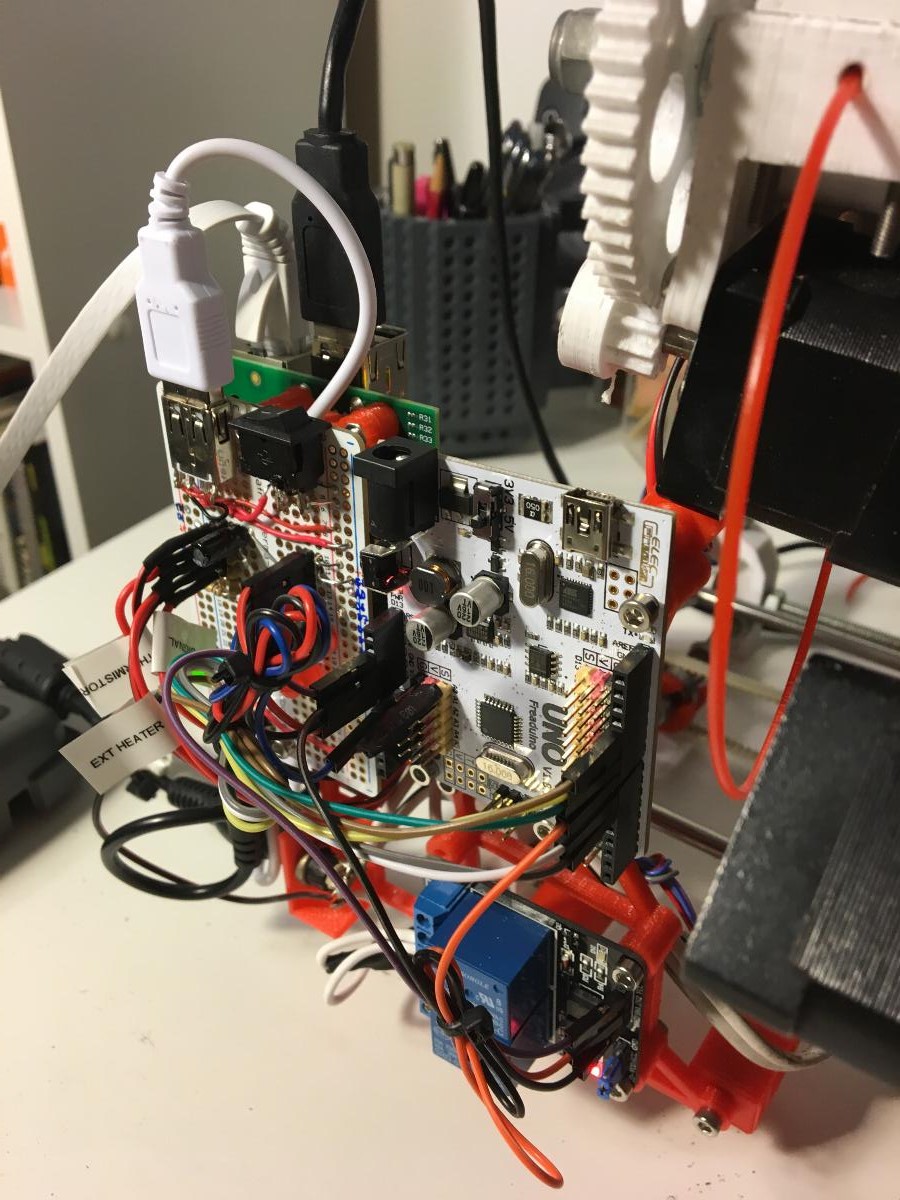
In a previous post I described some safety electronics for Squirty the RepRap that will switch off power to the printer if the hotend got too hot or if the bed was powered for too long. In this post I’ll describe an upgrade to that system and a setup to allow logging of safety information to a Raspberry Pi. Continue reading →
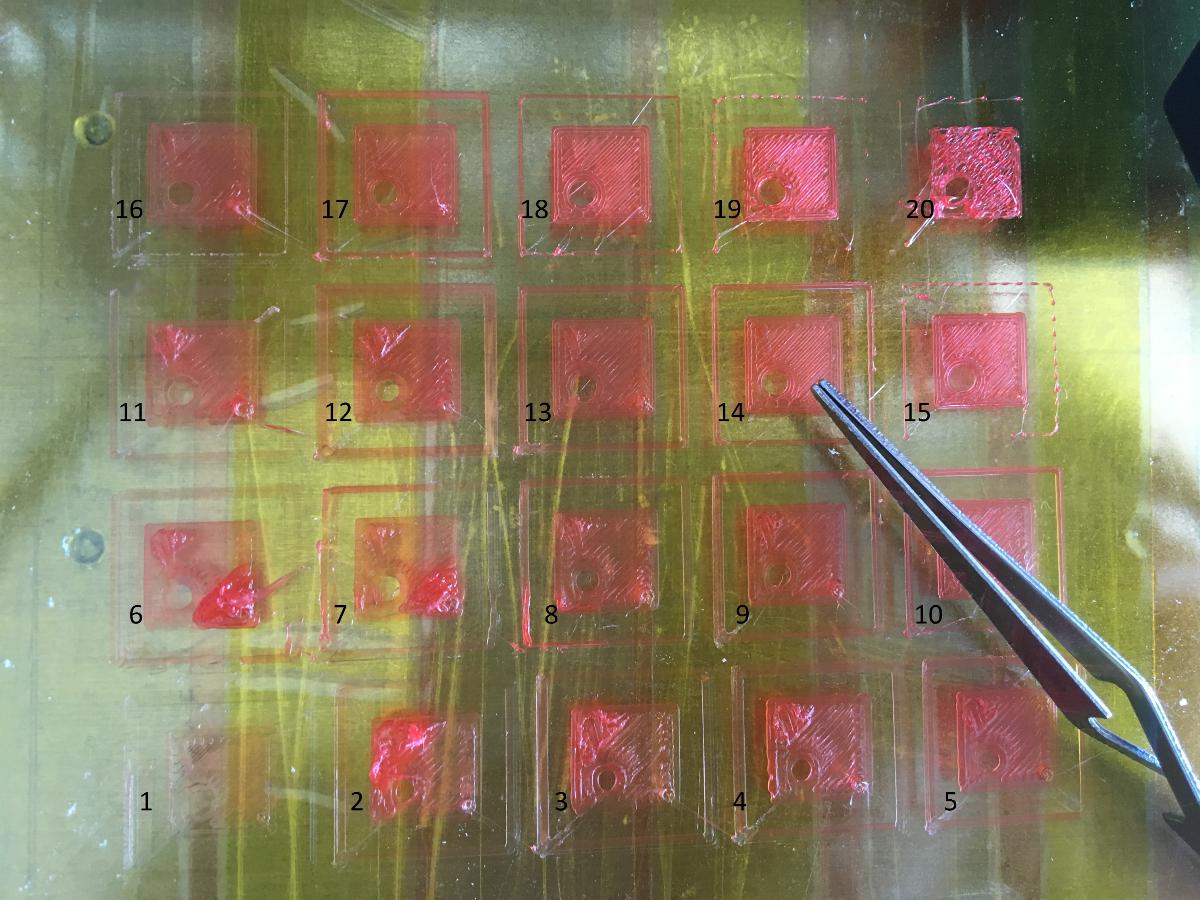
3D printing is, of course, the most frustrating hobby in all existence. Browse through any 3D printing forum and alongside the beautiful prints you’ll come across posts that compress incandescent rage into a few choice words like “I’m throwing my ******* printer out the window”. In my case most of this rage comes down to keeping the printer properly calibrated, in particular keeping a correct height for the first layer. 90% of my failed prints fail because of some issue with the first layer, and often it is because the height is wrong. In theory you should be able to set the height correctly using the time-honoured piece of paper technique, but it always requires a little bit of dialing in for the best quality. This post describes a way of simplifying that dial in process by printing multiple test pieces in a single print with a range of starting heights. Continue reading →
In this post I’ll describe a safety system I’ve put together for Squirty the RepRap that should prevent the type of catastrophic thermal runaway that I experienced a few weeks ago. The system could work for any printer with a little modification (but obviously use at your own risk!). Continue reading →
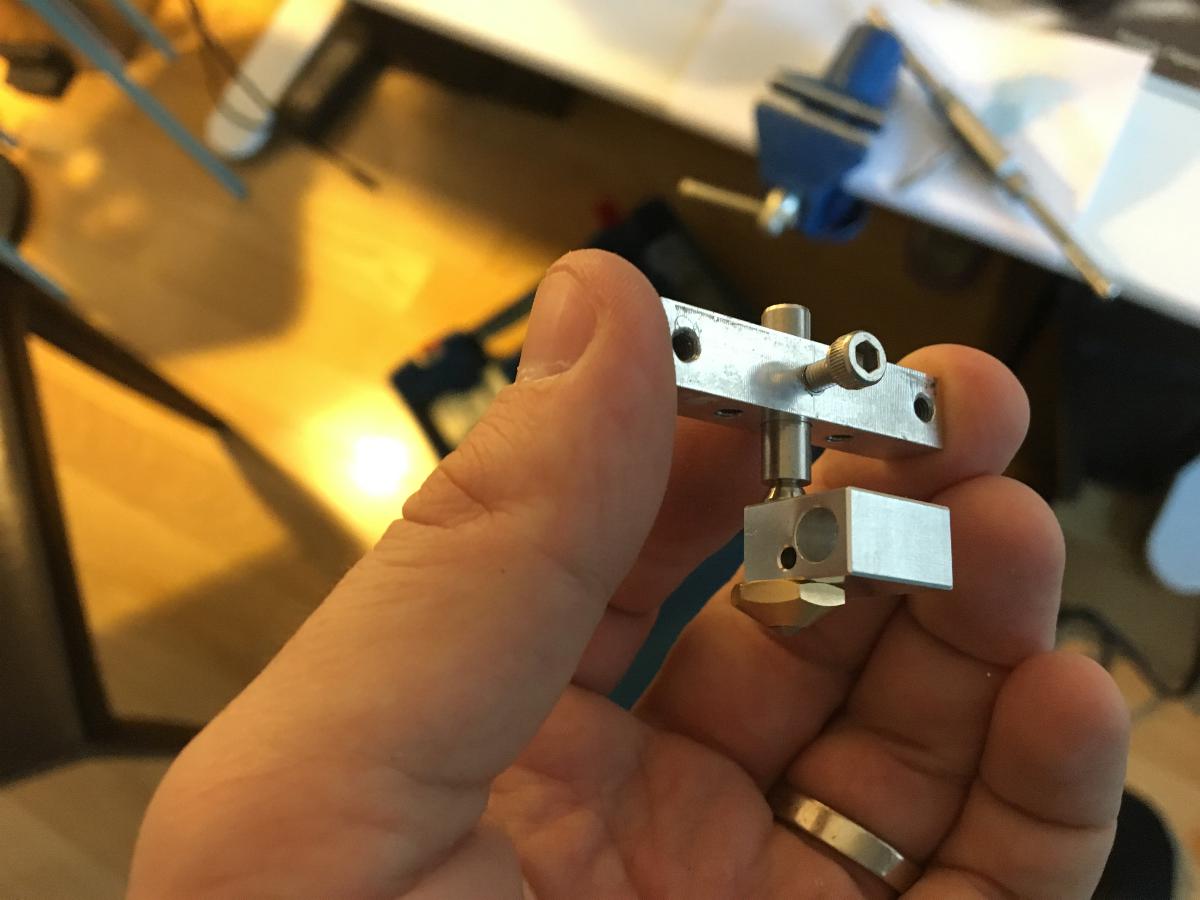
After my printer almost killed me I needed to get my hands on a new hotend. RepRapPro, which made my printer kit, has unfortunately closed down so I got a new nozzle, heater block, heatsink block, heater cartridge and thermistor from emaker.io. The nozzle is the new “quickset” design, which is clamped in place rather than screwed into the heatsink block. It’s also designed for a dual nozzle setup, so rather than having one central slot for a hotend it has one on either side. This dual setup requires a different design of x-carriage, which could be easily printed if one’s printer is not melted. Since mine was VERY melted I could have gone and used someone else’s printer, but that would have required leaving the house and possibly even social interaction, so I tried to think up a way of setting it up with the parts I had. Continue reading →
After a period of relevant dormancy, Squirty has had a lot of work done recently. I have replaced most of the original plastic parts, which were starting to crack, and put in new bearings. I also designed a new x-carriage ducted fan adaptor that put better air flow on the printed part and put in aluminium pulleys to replace the badly worn plastic ones. I’d even made some progress rebuilding the case after its destruction in 2014. Little did I know the printing gods had a plan ready to knock poor Squirty back and severely terrify me into the bargain. Continue reading →
I’m much better at acquiring kit for projects than I am at building them, so I tend to have a lot of Raspberry Pis lying around. I’m very lucky to have access to a beautiful view of the New York skyline at the moment, so I thought one good use (partially inspired by the House of Cards opening sequence) would be to do a timelapse of the cityscape. Continue reading →
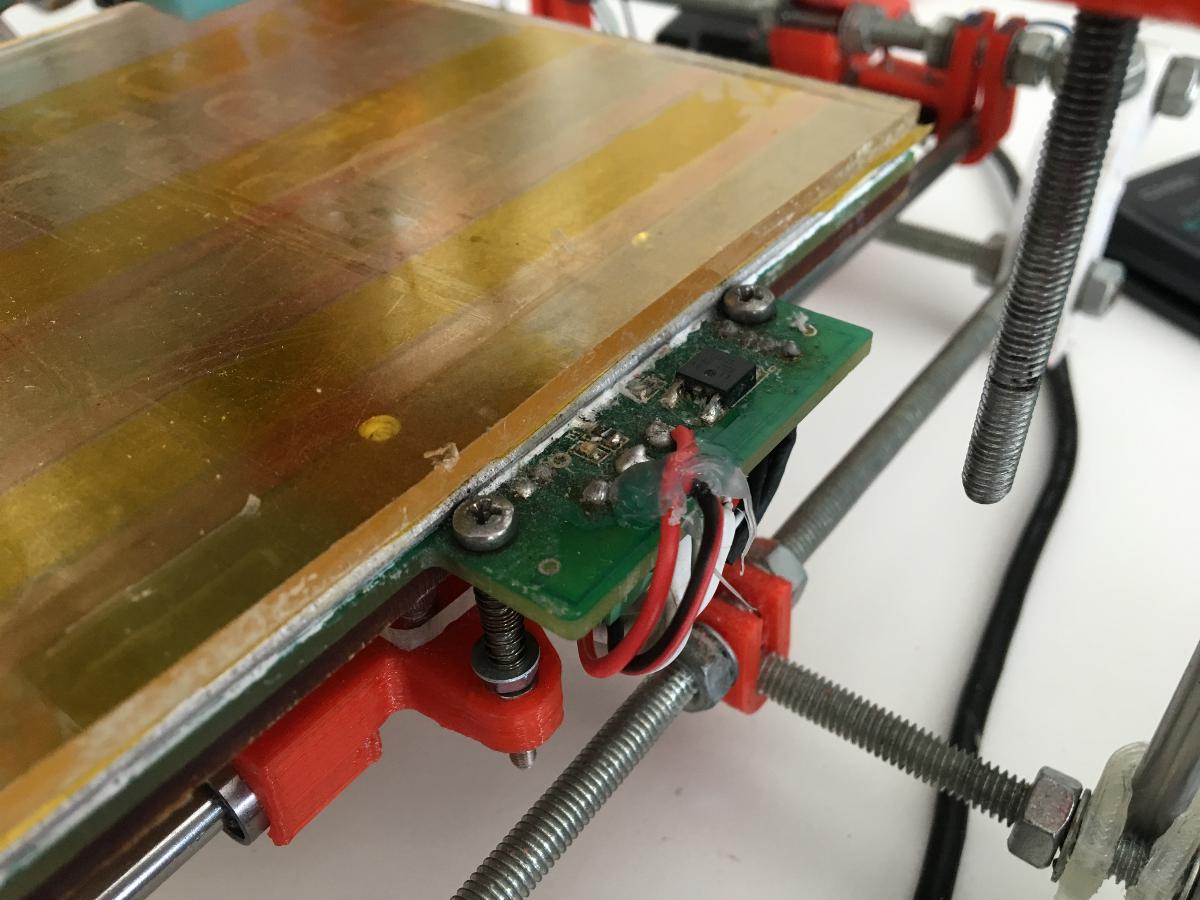
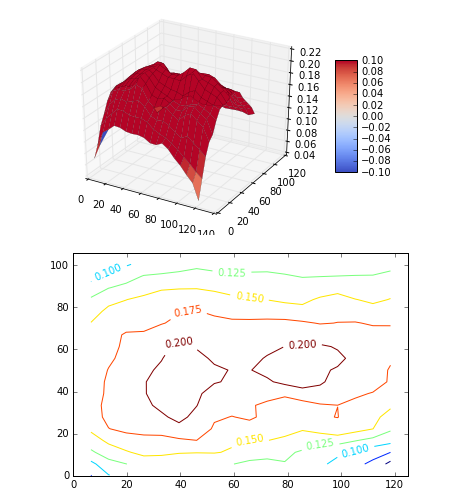
Once I got my printer’s z-probe and autoleveling set up I was struck with a sudden paranoia that my printer bed was saddled. The standard autoleveling in Marlin can deal with a printer bed that is not level, but it cannot fully correct for a bed that is not entirely planar*, e.g. one that is bowed or saddled. To try and set my paranoia to rest I decided to test whether my bed was truly flat. Continue reading →
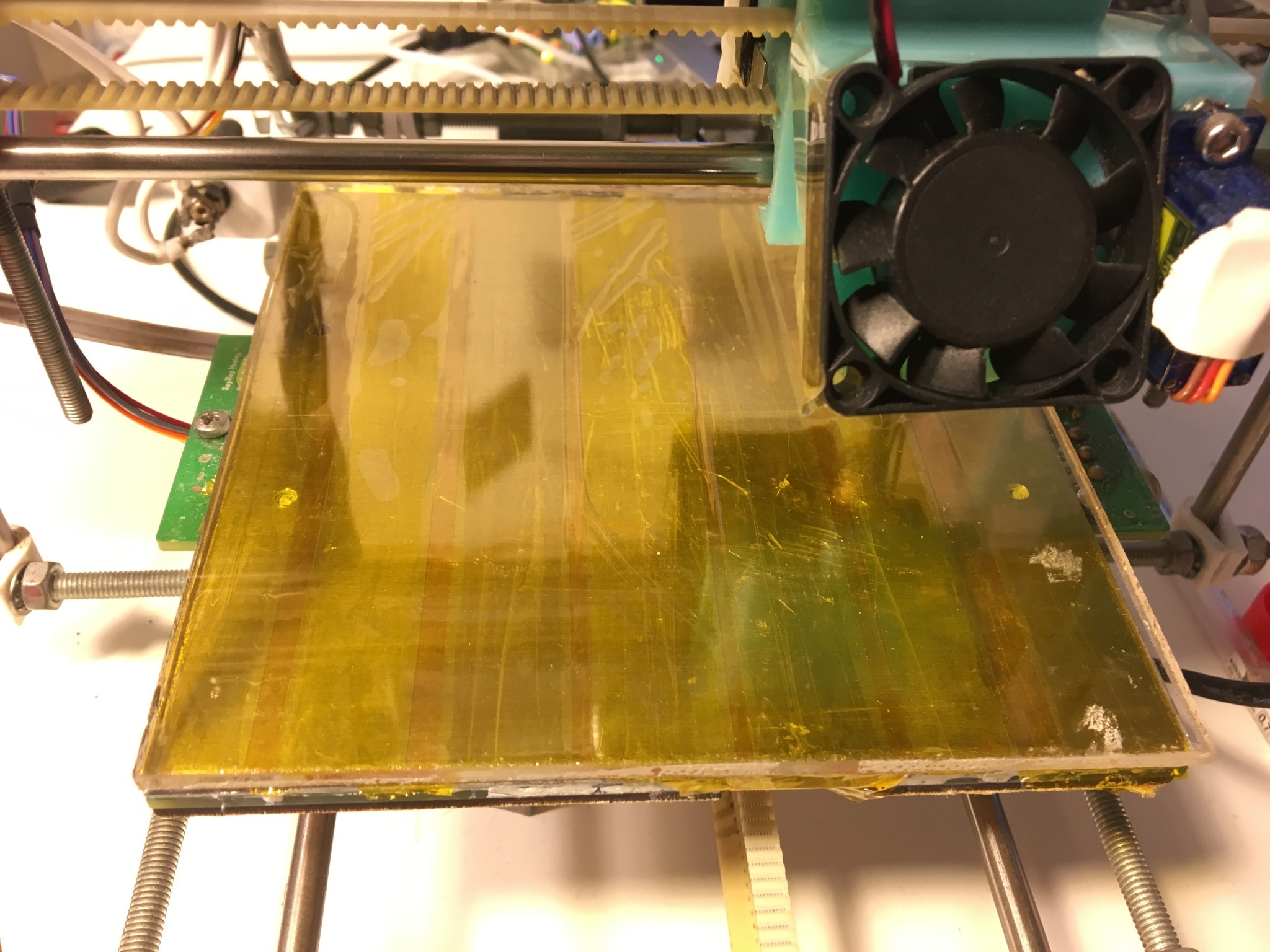
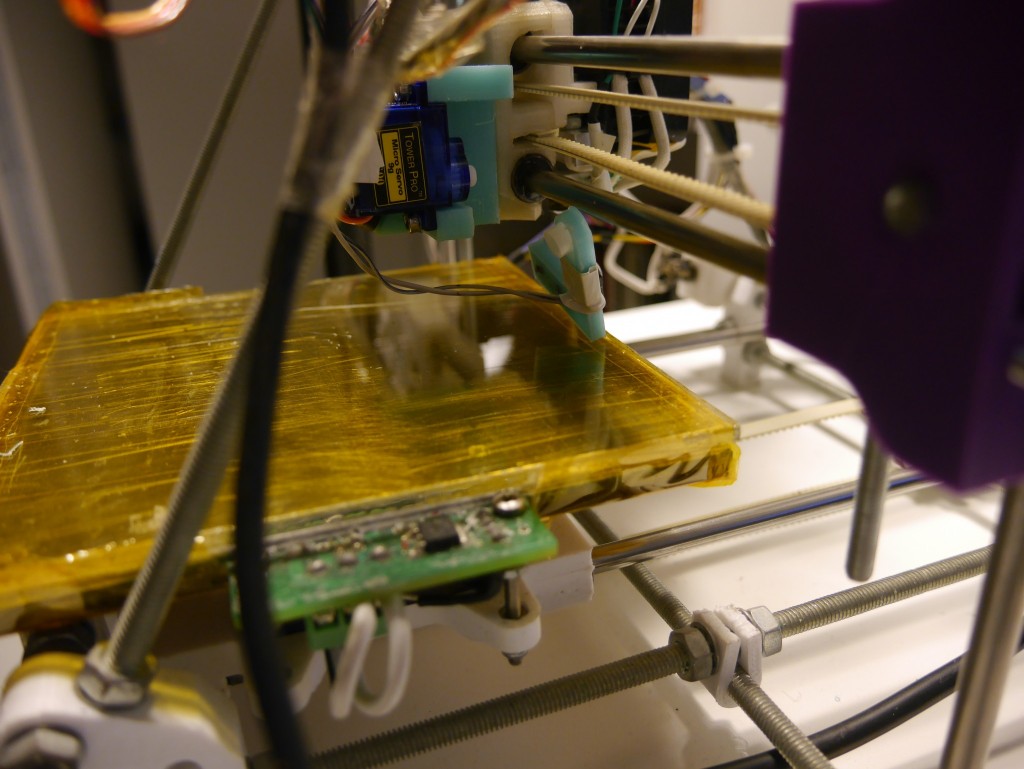
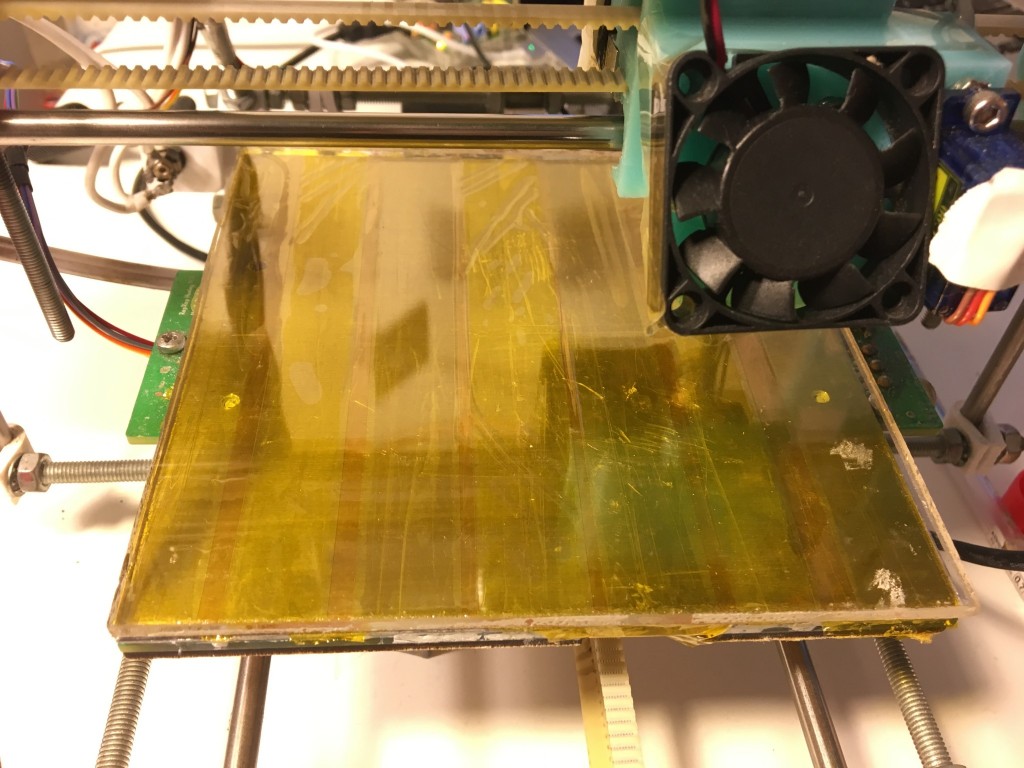
Some time ago I put a borosilicate glass bed on Squirty. I really like it because PLA will stick firmly to it when it is hot, but will pop off easily once it cools down. It is also really easy to clean. The only issue I had was how to attach it to the aluminium print bed surface. I know a lot of people use binder clips, but they have the disadvantage of slightly reducing the print area and also jut out above the print surface, risking collisions with the nozzle. Up until now my approach was to use kapton tape along the sides of the bed. It wasn’t a great solution because the glass still could slide back and forth slightly relative to the aluminium bed and it also tended to peel off over time. Today it occured to me that what I needed was double sided kapton tape. Such a thing does exist, but rather than ordering it I decided to cheat by alternating stripes of kapton tape with one “sticky side up” piece of tape stuck down by two “sticky side down” pieces. This arrangement holds the glass in place really firmly and yet I think I could still remove the bed without causing any damage.
This is a really simple idea that probably should have occurred to me years ago, but I am unreasonably pleased with it!
The bad old days. Tape around the side of the bed ineffectively holding the glass in place Alternating stripes of tape – one “sticky side up” piece of tape is held by two adjacent “sticky side down” pieces